I'm trying to reconstruct surface/depthmap from normals using the frankot/chellappa algorithm. The rows and cols are the size of the img I'm trying to reconstruct the depth for.
I obtain the normal vectors like this:
rows, cols = imglist[0].shape
def find_NormAlbedo(sources, imglist, rows, cols):
'''
:param sources: a list of light source coordinates as [x,y,z] coordinates per light source
(shape (20,3) for 20 sources)
:param imglist: a list of all images for one object
:param rows: shape[0] of every image
:param cols: shape[1] of every image
:return: returns normals and albedo's for an object
'''
normal = np.zeros_like(imglist[0], dtype=np.ndarray)
albedo = np.zeros_like(imglist[0])
# for every pixel
for x in range(rows):
for y in range(cols):
I = [] # intensity matrix of pixel x,y per image
S = [] # lightsources
for i in range(len(imglist)):
img = imglist[i]
I.append([img[x][y]])
S.append(sources[i])
# Least squares solution if S is invertible
# pseudoinverse
pseudoS = np.linalg.pinv(S)
ntilde = pseudoS @ I
p = np.linalg.norm(ntilde, ord=2)
if p != 0.:
n = ntilde / p
n = n.flatten()
# print(n)
# print(n.shape)
else:
n = np.zeros_like(ntilde.flatten())
normal[x][y] = n
albedo[x][y] = p
return normal, albedo
But suspect it's wrong because my albedo looks completely different from what I've seen in examples but have no clue where my mistake is...
Then I try to Get the surface from that using a wavepy function surface_to_grad:
def depthfromgradient(normalmap):
'''
:param normalmap: Previously obtained normals per pixel
:return: Surface/Depth map from normalmap
'''
surfacep = np.zeros_like(normalmap)
surfaceq = np.zeros_like(normalmap)
for row in range(rows):
for x in range(cols):
#print(x)
a, b, c = normalmap[row][x]
#print(a, b, c)
if c !=0:
p = -a / c # p=dZ/dx
q = -b / c # q=dZ/dy
surfacep[row][x] = p
surfaceq[row][x] = q
return surface_from_grad.frankotchellappa(surfacep, surfaceq, reflec_pad=True)
My goal is to visualise the depthmap and the normalmap with cv.imshow(), but I'm not sure where I went wrong. These are my questions/ideas of where it went wrong:
-Is the albedomap plausible? If no, I think I misunderstood part of this algorithm.
-My depthmap has complex numbers, is this normal? Where do these come from?
-I looked at the shape of the normal map, the albedo map and the depth map, they all have shape (640, 500), yet I can only visualise the albedomap, the others give me the following error, what is the problem here?:
cv2.imshow('DepthMap', surface)
TypeError: Expected cv::UMat for argument 'mat'
Any help in narrowing down this problem would be welcome.
Note:I have tried converting everything to np arrays before using imshow().
CodePudding user response:
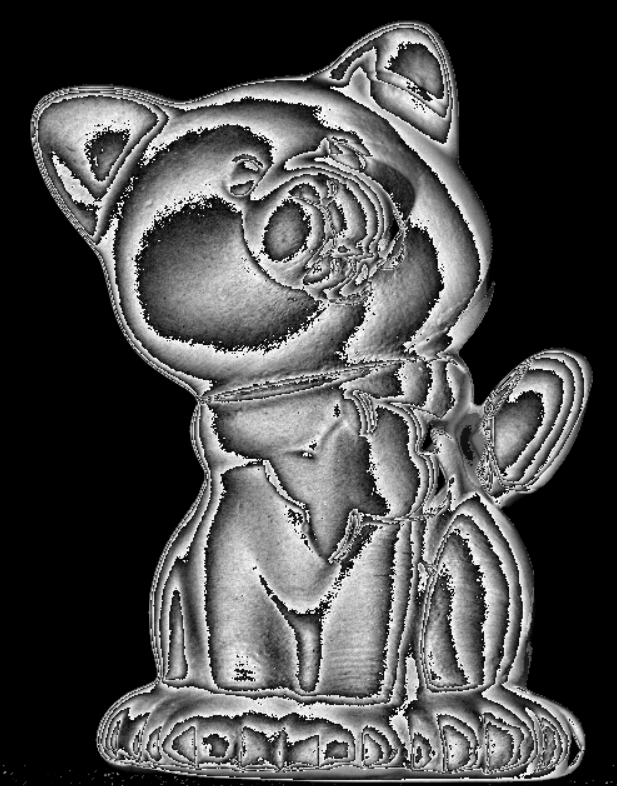
The problem is exactly as I described in my very first comment. The values you get for p (which become your albedo image) range from 0 to 1998.34. When you store that in a byte, you're just getting the low-order 8 bits, which wrap around.
If you change this:
albedo[x][y] = p
to this:
albedo[x,y] = p/8
you'll see that the resulting image looks great.
By the way, there are several optimizations you can do. Where you have xxx[x][y] with a numpy array, do xxx[x,y] instead. When you build your lightsources, instead of
I = [] # intensity matrix of pixel x,y per image
S = [] # lightsources
for i in range(len(imglist)):
img = imglist[i]
I.append([img[x][y]])
S.append(sources[i])
do
I = [img[x,y] for img in imglist]
S = sources[:len(imglist),:]
and your obtainData function can be made more readable by doing:
# Read all images
paths = (
fr".\PSData\PSData\{things[i]}\Objects\Image_01.png",
fr".\PSData\PSData\{things[i]}\Objects\Image_02.png",
fr".\PSData\PSData\{things[i]}\Objects\Image_03.png",
fr".\PSData\PSData\{things[i]}\Objects\Image_04.png",
fr".\PSData\PSData\{things[i]}\Objects\Image_05.png"
)
imgs = [cv2.imread(p,0) for p in paths]
...
# Apply masks to images: cv2.bitwise
imglist = [cv2.bitwise_or(img, img, mask=mask(img, threshold)) for img in imgs]