As I mentioned in the title, suppose I have a line segment from point 1 to point 2 and there is a circle with a center and radius I need to check if there is going to be a collision with the circle using code. This is how far I got. However, there is an issue with closestX and closestY since I need to check if they are on the line segment from point 1 to point 2 because if they are not on the line segment then there will be No collision. Sadly though Im stuck here and I cannot figure out a way to check if they are on the line segment or not. Please help thank you.
import math
p=2
obsHeight=200
DroneHeight=150
cx=3
cy=3
r=1
x1=1
y1=1
x2=1.5
y2=1.5
if DroneHeight<=obsHeight:
distX= x1 - x2
distY= y1 - y2
length=math.sqrt((distX*distX) (distY*distY ))
dot= (((cx-x1)*(x2-x1)) ((cy-y1)*(y2-y1)) )/(math.pow(length,p))
closestX=x1 ( dot * (x2-x1))
closestY=y1 ( dot * (y2-y1))
print(" Closest x: ",closestX)
print(" Closest y: ",closestY)
distX=closestX-cx
distY= closestY-cy
distance= math.sqrt((distX*distX) (distY*distY ))
print("The distance is: ", distance)
print("The length is: ", length)
if (r==distance):
print("Touching")
elif (distance<r):
print("COLLIDING")
else:
print("Will not collide")
else:
print(" Will not collide, the drone is higher than the obstacle")
CodePudding user response:
You can calculate the squared distance of the center of the circle to the line by
d2 = ((y1-y2)*(cx-x1) (x2-x1)*(cy-y1))**2/((x2-x1)**2 (y2-y1)**2)
Now just compare that value to the squared radius. If d2<r**2 then the line cuts the circle.
Edit: I think you already are pretty close to a correct solution. In the line where you calculate the dot product, you should divide by the length of the line segment and not by its squared length. Just putting a (...)**0.5 around the math.pow expression should give the correct value.
Note: Phython has a builtin power operator called **, so no need to use math.pow
CodePudding user response:
Ignoring the specificity of your code, let's say that you have a line segment, a center and a radius. Let's write a general solution to whether a line segment in N-dimensions intersects a hyper-sphere in N-dimensions. This will give us the correct solution for your problem in the special case of 2D.
Your function signature would look like this:
def intersects(p1, p2, c, r):
p1 and p2 are vectors of length N. In your case, p1 = np.array([1, 1]), and p2 = np.array([1.5, 1.5]). c is a vector of the same length (c = np.array([3, 3])), and r is a scalar radius (r = 1). I strongly recommend using numpy arrays for your math because it is much faster if you use it right, and you can apply element-wise operations to arrays (e.g. p2 - p1) without using a loop.
A line passing through p1 and p2 can be parametrized as p = p1 t * (p2 - p1). Every point on the line p corresponds some value of the parameter t. Specifically, t == 0 corresponds to p = p1 and t == 1 corresponds to p = p2. That means that you can know if a point is on the line segment by checking if its parameter is in the range [0, 1].
The problem then becomes finding the value of t such that p is closest to c. If t < 0 or t > 1, then you know that the extrema for the line segment are at the endpoints. Otherwise, you need to compare the distances of both the endpoints and the p you found.
There are a couple of different ways of coming up with the solution. The geometric approach uses the fact that the nearest approach happens at the perpendicular from c to the line. The differential approach finds where the derivative of the length is zero. I will show the former here.
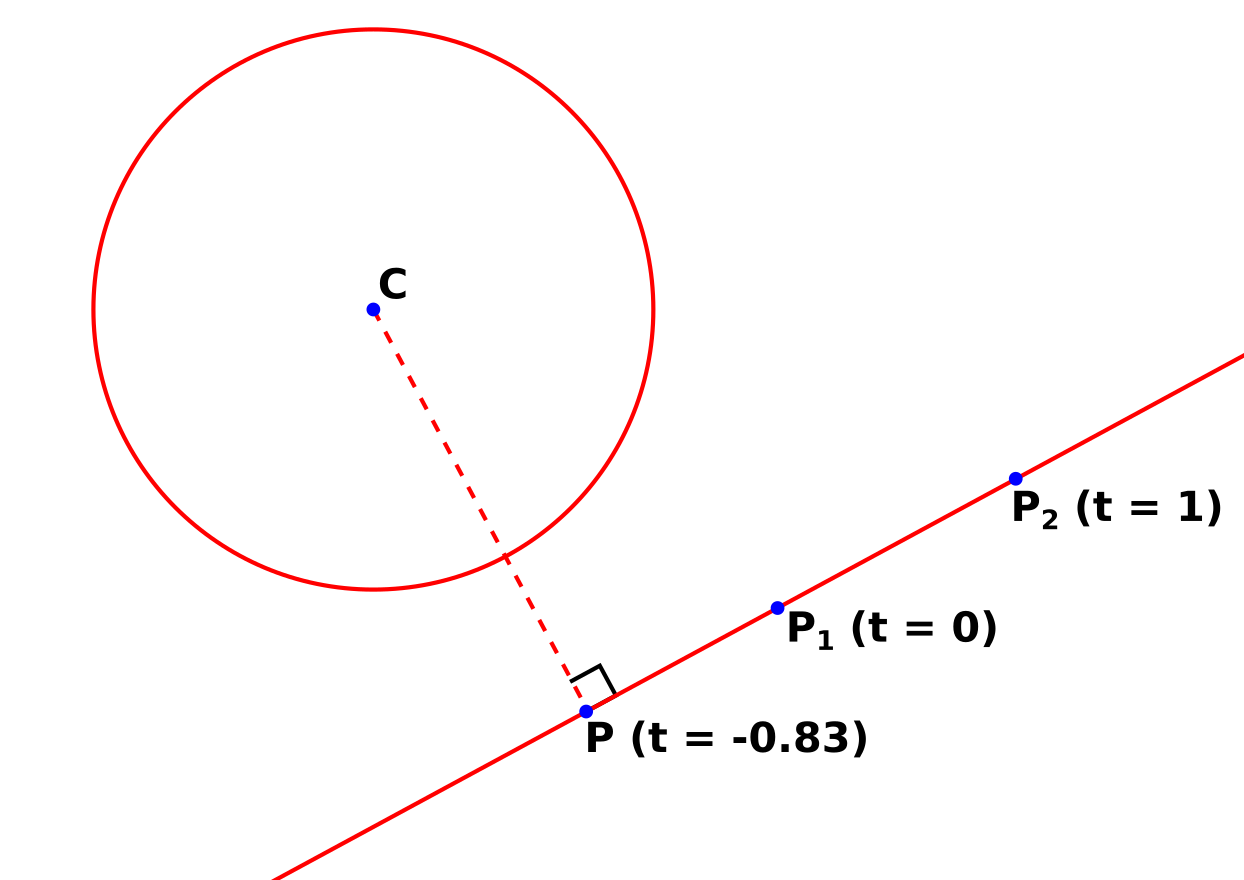
Looking at the diagram, you have the following equation:
(c - p).dot(p2 - p1) == 0
(c - p1 t * (p2 - p1)).dot(p2 - p1) == 0
c.dot(p2 - p1) - p1.dot(p2 - p1) t * (p2 - p1).dot(p2 - p1) == 0
t == (p1.dot(p2 - p1) - c.dot(p2 - p1)) / (p2 - p1).dot(p2 - p1)
You can now write your function like this:
def intersects(p1, p2, c, r):
c1 = np.subtract(p1, c)
c2 = np.subtract(p2, c)
dist1 = np.linalg.norm(c1)
dist2 = np.linalg.norm(c2)
# If point are on opposite sides of circle, intersects
if (r - dist1) * (r - dist2) < 0:
return True
# If both on inside, does not intersect
if r > dist1:
return False
dp = np.subtract(p2, p1)
t == dp.dot(c1) / dp.dot(dp)
# If closest approach is outside segment, does not intersect
# convince yourself of this (use symmetry about the line c-p)
if t < 0 or t > 1:
return False
cp = np.subtract(p1 t * dp, c)
distp = np.linalg.norm(cp)
# only other possibility of approach is when closest point is inside radius
return distp <= r